OpenSource Projects
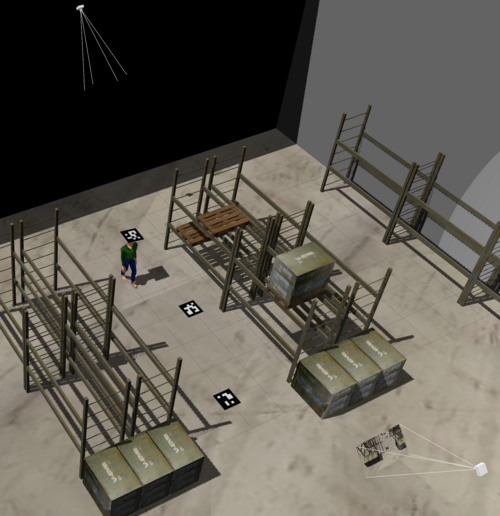
SIMLAN (Simulation for Indoor Multi-Camera Localization and Navigation)
This simulation environment, based on the Gazebo simulator and ROS2, resembles a Volvo trucks’ warehouse and serves as a playground for rapid prototyping and testing indoor multi-camera localization, positioning, and navigation algorithms. While this environment can be utilized for Multi-Sensor SLAM (Simultaneous Localization and Mapping) using cameras, IMUs, GPS, lidar, and radar mounted on the robot, the focus of this project is not on mapping but on assuming a fixed building layout and using fixed cameras mounted on the ceiling.
Learn more about SIMLAN open-source project here: https://github.com/infotiv-research/SIMLAN
Autonomous Platform (Gen4)
Autonomous Platform (generation 4) project is a platform on which internal and external research projects can be tested on. (i.e Autonomous Drive algorithms) and to expand the knowledgeable in different aspects of software and hardware system development. The new generation of Autonomous Platform was created by Fredrik Juthe and Erik Magnusson as part of a master thesis at Chalmers University of technology spring 2023 under supervision of Hamid Ebadi with the title of “Design of a modular centralized E/E and software architecture for a small-scale automotive platform”
The implementation of software pipeline for Imitation Learning for achieving autonomous driving using both behavioral cloning (BC) and Human Gated Dataset Aggregation (HG-DAgger) is done by Arvid Petersén and Johan Wellander as a part of a master thesis at Chalmers University of technology spring 2023 under supervision of Hamid Ebadi with the title of Autonomous Driving via Imitation Learning in a Small-Scale Automotive Platform - a Comparison Between BC, HG-DAgger, and the use of Various Inputs
Learn more about Autonomous Platform (AP) project:
- The latest public documentation is available in the following address: https://infotiv-research.github.io/autonomous_platform/
- The source code for the project can be found in the following address: https://github.com/infotiv-research/autonomous_platform
MLOps using Kubernetes
The results from the master thesis titled “Automation and Orchestration for Machine Learning Pipelines, A Study of Machine Learning Scaling: Exploring Micro-service architecture with Kubernetes”
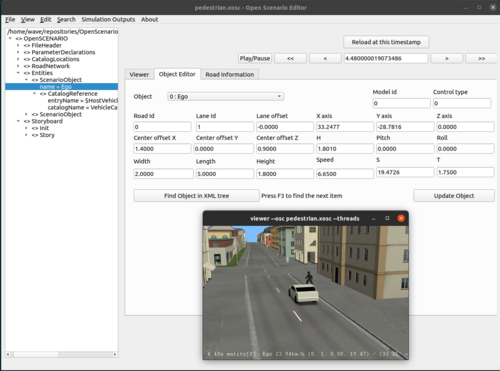
Open Scenario Editor
Open Scenario Editor is a simple ASAM OpenSCENARIO (*.xosc) editor based on Environment Simulator Minimalistic (esmini).
Open Scenario Editor repository